mirror of
https://github.com/JustinSDK/dotSCAD.git
synced 2025-01-17 14:18:13 +01:00
1.5 KiB
1.5 KiB
ptf_rotate
Rotates a point a degrees around the axis of the coordinate system or an arbitrary axis. It behaves as the built-in rotate module
Since: 2.3
Parameters
point: A 3D point[x, y, z]or a 2D point[x, y].a: If it's[deg_x, deg_y, deg_z], the rotation is applied in the orderx,y,z. If it's[deg_x, deg_y], the rotation is applied in the orderx,y. If it's[deg_x], the rotation is only applied to thexaxis. If it's an number, the rotation is only applied to thezaxis or an arbitrary axis.v: A vector allows you to set an arbitrary axis about which the object will be rotated. Whenais an array, thevargument is ignored.
Since: 2.3.
Examples
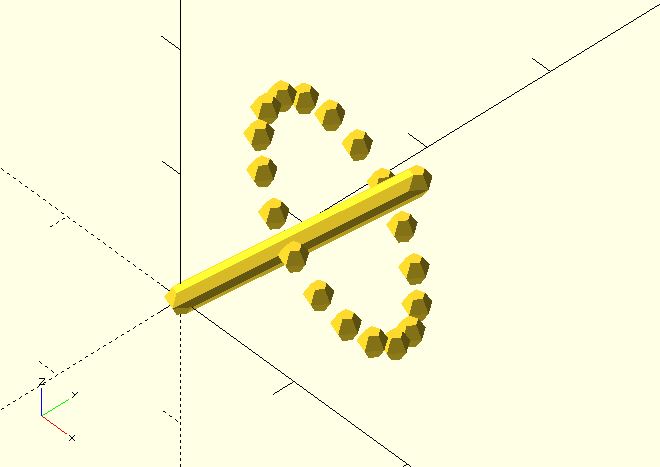
use <ptf/ptf_rotate.scad>;
point = [20, 0, 0];
a = [0, -45, 45];
hull() {
sphere(1);
translate(ptf_rotate(point, a))
rotate(a)
sphere(1);
}
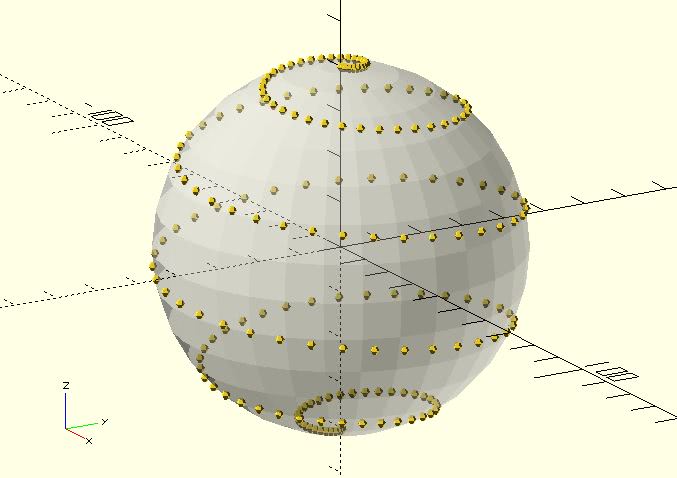
use <ptf/ptf_rotate.scad>;
radius = 40;
step_angle = 10;
z_circles = 20;
points = [for(a = [0:step_angle:90 * z_circles])
ptf_rotate(
[radius, 0, 0],
[0, -90 + 2 * a / z_circles, a]
)
];
for(p = points) {
translate(p)
sphere(1);
}
%sphere(radius);
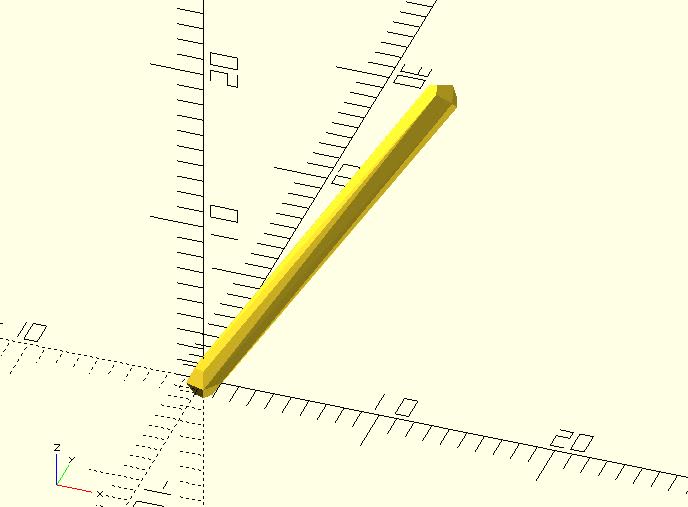
use <ptf/ptf_rotate.scad>;
v = [10, 10, 10];
hull() {
sphere(1);
translate(v)
sphere(1);
}
p = [10, 10, 0];
for(i = [0:20:340]) {
translate(ptf_rotate(p, a = i, v = v))
sphere(1);
}